|
  |
 Управление преобразователями частоты механически связанными двигателями Управление преобразователями частоты механически связанными двигателями |
|
|
|
|
 14.9.2013, 3:41 14.9.2013, 3:41
|
Группа: Участники форума
Сообщений: 1650
Регистрация: 10.5.2011
Из: Гатчина
Пользователь №: 107121

|
Цитата(alex944966 @ 5.9.2013, 16:41)  необходимо управлять при помощи 2-х ПЧ 2-мя асинхронными, которые жестко (через редукторы) приделаны с двух сторон одного вала, на котором насажен барабан той самой лебедки. А почему необходимо управлять двумя двигателями при помощи именно 2-х ПЧ, а не одного? Все ваши проблемы исчезнут сами собой.
|
|
|
|
|
|
|
|
14.9.2013, 5:16
|
Группа: Участники форума
Сообщений: 857
Регистрация: 27.4.2008
Пользователь №: 18181
|
Цитата(and @ 14.9.2013, 6:41) А почему необходимо управлять двумя двигателями при помощи именно 2-х ПЧ, а не одного?
Все ваши проблемы исчезнут сами собой. В этом случае нужно делать почти двойной запас по мощности, так как возможна ситуация, когда вся нагрузка ляжет на одну сторону (перекос). Кстати, автор не озвучил никаких цифр по мощности. И изготовлена ли уже механика лебедки? Ей перекосы могут не понравиться.
|
|
|
|
|
|
|
|
14.9.2013, 9:22
|
Группа: Участники форума
Сообщений: 1650
Регистрация: 10.5.2011
Из: Гатчина
Пользователь №: 107121
|
Цитата(Михайло @ 14.9.2013, 6:16) В этом случае нужно делать почти двойной запас по мощности, так как возможна ситуация, когда вся нагрузка ляжет на одну сторону (перекос). И каким способом можно получить перекос нагрузки, если оба двигателя соединены параллельно как электрически, так и механически? Выше рассматривался случай, когда из-за неидентичности компонентов на регуляторы 2-х разных ПЧ приходят два разных сигнала рассогласования, и 2 ПЧ выдают РАЗНЫЕ частоты/напряжения на 2 двигателя. А те начинают тянуть/тормозить. А здесь у нас одна частота/напряжение. Неидентичность характеристик двигателей даст лишь небольшую разницу вклада каждого в суммарный момент. Никакого перетягивания и перекоса не будет. Если задача - просто вылезти из болота, не нужно добавлять в условие фразу "таща себя за волосы".
Сообщение отредактировал and - 14.9.2013, 9:29
|
|
|
|
|
|
|
|
14.9.2013, 18:28
|
Группа: Участники форума
Сообщений: 857
Регистрация: 27.4.2008
Пользователь №: 18181
|
Цитата(and @ 14.9.2013, 12:22) Никакого перетягивания и перекоса не будет. Перекос будет. Но точно не будет генераторного режима, потому что в любом случае синхронные частоты вращения двух двигателей совпадают, если у них одинаковое число полюсов (но необязательно одинаковые мощности) - отсюда вытекает, что характеристики n(M) пересекаются в точке M=0, n = n0. На самом деле вариант со скалярным управлением и с одним ПЧ достоин существования. Особенно, если мощности двигателей гораздо меньше сотен киловатт. Для конкретной задачи нужно определять допустимый перекос по крутящему моменту. И, кстати, кто-то тут выразился неудачно: предлагал один ПЧ + 2 двигателя + векторное управление. Не надо косячить! А-яй-яй!
Сообщение отредактировал Михайло - 14.9.2013, 18:28
|
|
|
|
|
|
|
|
13.2.2015, 23:21
|
Группа: Участники форума
Сообщений: 757
Регистрация: 6.3.2014
Пользователь №: 226003
|
Вот не знаю почему, но у нас все краны с параллелным подключением электродвигателей работают в режиме векторного управления скоростью!!! Италия  !!!
|
|
|
|
|
|
|
|
15.2.2015, 22:33
|
Группа: Участники форума
Сообщений: 660
Регистрация: 29.7.2010
Пользователь №: 66483
|
Цитата(mr_Frodo64 @ 13.2.2015, 23:21) Вот не знаю почему, но у нас все краны с параллелным подключением электродвигателей работают в режиме векторного управления скоростью!!! Италия !!! ATV71 работает в векторном режиме на несколько двигателей.
|
|
|
|
|
|
|
|
23.2.2015, 21:57
|
Группа: Участники форума
Сообщений: 757
Регистрация: 6.3.2014
Пользователь №: 226003
|
Синамиксы тоже работают в векторном режиме с параллельным включением моторов... НО, разве может привод рассчитать вектор двигателей, если у них ось не связана жестко? Да, я согласен, когда два двигателя сидят на одном валу, то это все-равно, что один двигатель с шестью обмоткаим, но если это не так, например на приводе моста крана...
|
|
|
|
|
|
|
|
24.2.2015, 11:48
|
Группа: Участники форума
Сообщений: 660
Регистрация: 29.7.2010
Пользователь №: 66483
|
Цитата(mr_Frodo64 @ 23.2.2015, 21:57) Синамиксы тоже работают в векторном режиме с параллельным включением моторов... НО, разве может привод рассчитать вектор двигателей, если у них ось не связана жестко? Да, я согласен, когда два двигателя сидят на одном валу, то это все-равно, что один двигатель с шестью обмоткаим, но если это не так, например на приводе моста крана... Вы немножко путаете мягкое и теплое. Вектор двигателей - это что такое? на приводе моста крана, при многодвигательном приводе, прекрасно работает ATV71 в режиме вектора, закон SVC U.
|
|
|
|
|
|
|
|
3.3.2015, 10:01
|
Группа: Участники форума
Сообщений: 21
Регистрация: 3.10.2014
Пользователь №: 246644
|
Какие ПЧ лучше выбрать для такого механизма (дипломный проект). http://www.stroitelstvo-new.ru/bridge_cran...ge_cranes36.jpgВ нормальном режиме должны работать оба двигателя, в аварийном один двигатель должен завершить начатую операцию.
Сообщение отредактировал motorhead89 - 3.3.2015, 10:03
|
|
|
|
|
|
|
|
3.3.2015, 16:19
|
Группа: Участники форума
Сообщений: 14839
Регистрация: 28.11.2008
Из: под Самарой..
Пользователь №: 26006
|
Цитата(Andrew_2610 @ 24.2.2015, 12:48) прекрасно работает ATV71 в режиме вектора, закон SVC U. уточню Цитата [SVC V] (UUC): векторное управление потоком по напряжению в разомкнутой системе. Этот закон управления
рекомендуется при замене преобразователя ATV58. Он обеспечивает работу нескольких двигателей,
подключенных параллельно к одному ПЧ. не использовал, но буду иметь ввиду... интересно.
|
|
|
|
|
|
|
|
4.2.2016, 20:16
|
Группа: New
Сообщений: 9
Регистрация: 5.8.2015
Пользователь №: 274791
|
Цитата(alex944966 @ 5.9.2013, 15:41) Здравствуйте.
Может быть кто сталкивался с подобной задачей:
необходимо управлять при помощи 2-х ПЧ 2-мя асинхронными, которые жестко (через редукторы) приделаны с двух сторон одного вала, на котором насажен барабан той самой лебедки.
Как я понял, необходимо выравнивать и скорости АД, и их моменты. Подскажите,на каких ПЧ можно эту задачу реализовать?
Очень хотелось найти вариант побюджетней, а то заказчики и так ПЧ боятся, а цены АББ или Сименс с оптоплатами и энкодерами и подавно испугаются. Извините влезу сюда у меня такая проблемв может кто поможет. Мануале по mitsubishi, есть один пример "Регулирование крутящего момента", но там регулирование только через аналоговый вход 0-10В, а мне нужно 4-20мА. У меня один конвейер и два движка, конвейер жесткая сцепка, не могу разобраться что мне нужно "Задание выходного крутящего момента" или "Регулирование крутящего момента" на выходе с аналога хочу присвоить значение 7 на клемму СА или АМ , крутящии момент, на вход 1 или 4 присвоить регулирование крутящего момента(бессенсорное векторное управление) в параметре 800 - 11 значение. В итоге сделать ведомый и ведущий. Вот сомнение дает в мануале "Регулирование крутящего момента" координально отличается в настройке от "Задание крутящего момента". А "Задание крутящего момента" можно осуществить через 4-20мА. Ведущий частотник хочу за параметрировать векторное управление sensorless, а ведомый регулирование по моменту тоже sensorless. Описываю. Шахта -140 метров, стоит конвейер протяженность ленты 1800 метров, по середине стоят два движка по 290 КВт, два частотника FR-A770-355K-79 производителя mitsubishi по 350 квт на 660 В. Проблема заключается в том, что движки горят из за высоких токов. На первом движке оператор выставляет вручную 32.74 Hz, на втором 32.52 Hz, чтобы уравнять токи. Если выставить одинаковую им частоту, то на первом движке без нагрузки на конвейере ленты 230, на втором 180А, приходится подкручивать, частотой, чтобы уравнять токи. Управление стоит безсенсорное векторное управление. Хочу завтра сделать регулирование моментом. На первом частотнике хочу так же оставить векторное безсенсорное управление, а на втором, поставить безсенсорное управление по моменту, и весь это процесс управлять по аналоговому входу и выходу. Только я не пойму есть задание момента, а есть регулирование моментом, а еще есть регулирование магнитным потоком, что выбрать правильней? А под нагрузкой начинаются пляски токов, даже если частоту подогнали, токи от 200 ампер до 300 бегают на одном и так же навтором, ну разность токов всегда присутсвует, то у первого движка больше, то наоборот.И как просит руководство, чтобы токи были одинаковыми. А как сделать токи еще одинаковые, я не знаю. Сегодня пробывал сделать синхронизацию по моменту, все никак, не запускается у меня. Откинул муфты и пробывал их сихронинизировать в master и slave, по входу 4-20ma по частоте, все получается, по наприжению все получается, а вот задавать момент не получается, помогите пожалуйста. Посмотрите параметры пожалуйста, может я что то неправильно выставляю, чтобы управлять по моменту. Со стороны master через клемму CA выдаю 0-10В и присвоил значение для 158 параметра функцию 7 - Фактическое значение крутящего момента. Со стороны Slave выставляю параметр 73 функцию 0, клемма 1, 800 параметр функцию - 11 Бессенсорное векторное управление Регулирование крутящего момента. Параметр 804 задание крутящего момента через аналоговый вход клемма 1. Посмотрите на рисунке, мой параметры для master(ведущий) и slave (ведомый) пожалуйста и скажите что я не так делаю?  photo_1.JPG
photo_1.JPG ( 1,4 мегабайт )
Кол-во скачиваний: 8
photo_2.JPG ( 1,06 мегабайт )
Кол-во скачиваний: 11
|
|
|
|
|
|
|
|
6.2.2016, 18:40
|
Группа: Участники форума
Сообщений: 857
Регистрация: 27.4.2008
Пользователь №: 18181
|
Цитата(naimen @ 4.2.2016, 22:16) Хочу завтра сделать регулирование моментом. Значит я уже не успел со своим советом?  Цитата(naimen @ 4.2.2016, 22:16) На первом частотнике хочу так же оставить векторное безсенсорное управление, а на втором, поставить безсенсорное управление по моменту, и весь это процесс управлять по аналоговому входу и выходу. Все правильно, но только из Вашего объяснения не совсем ясно, как будет задаваться момент на ведомом приводе. Хотите уравнять моменты? Это правильно, если бы не нюанс, который объясню ниже. Меня смущает проблема передачи аналоговых сигналов на расстояние порядка километра. Цитата(naimen @ 4.2.2016, 22:16) Только я не пойму есть задание момента, а есть регулирование моментом, а еще есть регулирование магнитным потоком, что выбрать правильней? Если надо регулировать момент, то при чем тут возбуждение двигателя? Цитата(naimen @ 4.2.2016, 22:16) А под нагрузкой начинаются пляски токов, даже если частоту подогнали, токи от 200 ампер до 300 бегают на одном и так же навтором, ну разность токов всегда присутсвует, то у первого движка больше, то наоборот. Между двигателями наверняка далеко не самая жесткая механическая связь. Это может быть причиной колебательности процессов даже при условии попытки выравнивания момента. Наиболее легко выравнивать моменты/токи на двигателях с абсолютно жесткой связью. Это и есть тот самый нюанс выравнивания моментов. Цитата(naimen @ 4.2.2016, 22:16) И как просит руководство, чтобы токи были одинаковыми. А как сделать токи еще одинаковые, я не знаю. Если бы мех. связь была жесткая (скорости двигателей одинаковые), то выравнивание моментов привело бы к выравниванию токов. Из Вашего описания не ясно, что за лента, я не разбираюсь в таких гигантских объектах. Надо бы мне почаще смотреть про гигантские машины на Discovery что ли...  Цитата(naimen @ 4.2.2016, 22:16) Сегодня пробывал сделать синхронизацию по моменту, все никак, не запускается у меня. В вашем конкретном оборудовании не разбираюсь, к сожалению.
Сообщение отредактировал Михайло - 6.2.2016, 18:43
|
|
|
|
|
|
|
|
19.2.2016, 16:04
|
Группа: New
Сообщений: 5
Регистрация: 19.2.2016
Пользователь №: 290523
|
Добрый день! Может кто подскажет. Проектируем компрессорную установку. Рабочая среда - водородосодержащий газ и азот. В ПБ03-582-03 Правила устройства и безопасной эксплуатации компрессорных установок с поршневыми компрессорами, работающими на взрывоопасных и вредных газах, в разделе IV.Система контроля, управления и противоаварийной автоматической защиты компрессорных установок, в пункте 4.23 Компрессоры с частотно-регулируемым электроприводом оснащаются тахометрическими приборами. Насколько необходимо имея ПЧ, который по умолчанию меряет частоту, ставить дополнительный датчик оборотов?
|
|
|
|
|
|
|
|
19.2.2016, 23:00
|
Группа: Участники форума
Сообщений: 757
Регистрация: 6.3.2014
Пользователь №: 226003
|
Цитата(Eugen_Ks @ 19.2.2016, 16:04) Добрый день! Может кто подскажет. Проектируем компрессорную установку. Рабочая среда - водородосодержащий газ и азот. В ПБ03-582-03 Правила устройства и безопасной эксплуатации компрессорных установок с поршневыми компрессорами, работающими на взрывоопасных и вредных газах, в разделе IV.Система контроля, управления и противоаварийной автоматической защиты компрессорных установок, в пункте 4.23 Компрессоры с частотно-регулируемым электроприводом оснащаются тахометрическими приборами. Насколько необходимо имея ПЧ, который по умолчанию меряет частоту, ставить дополнительный датчик оборотов? Мутная формулировка... Вот если бы все ФОРМУЛИРОВАЛОСЬ ЖЕСТКО , как в ПУЭ, а тут... "следует, оснащаются"... как кисель... Хочешь делай, хочешь не делай... Вот если бы было сформулировано:" Работа компрессорных установок с частотно-регулируемым приводом запрещается без оснащения их тахометрическими приборами", то всё понятно и предельно точно... А тут - дышло...
|
|
|
|
|
|
|
|
20.2.2016, 0:41
|
Группа: Участники форума
Сообщений: 3718
Регистрация: 6.9.2007
Пользователь №: 11117
|
Может чисто для индикации? Мало ли в частотнике дисплей погас..
|
|
|
|
|
|
|
|
20.2.2016, 7:07
|
Группа: Участники форума
Сообщений: 757
Регистрация: 6.3.2014
Пользователь №: 226003
|
Так если в стадии проекта, то заложите, на всякий случай. Хотя я тоже при такой формулировке не понимаю ДЛЯ ЧЕГО? Может там какое-нибудь обоснование есть? Если только для индикации оборотов, то это все решаемо и без датчика. Как простейший вариант на аналоговый выход частотника подается значение оборотов и ставится индикатор со шкалой
Сообщение отредактировал mr_Frodo64 - 20.2.2016, 7:14
|
|
|
|
|
|
|
|
20.2.2016, 13:57
|
Группа: New
Сообщений: 5
Регистрация: 19.2.2016
Пользователь №: 290523
|
Спасибо за ответы. Дело в том, что оборудование располагается во взрывоопасное зоне 1 (Зона в которой существует вероятность присутствия взрывоопасной газовой смеси в нормальных условиях эксплуатации.) Плюс ко всему категория взрывоопасности смеси не ниже IIC. Нашел тахометр ИП-115Ех со степенью взрывозащиты 1ExibIIBT4X и выходом 4-20мА (через барьер и вторичный преобразователь), все подходит кроме категории взрывоопасности смеси (IIB). Может кто сталкивался с такими датчиками (выход 4-20мА) или хотя бы с частотным выходом для таких условий? Цитата(mr_Frodo64 @ 20.2.2016, 6:07) Так если в стадии проекта, то заложите, на всякий случай. Хотя я тоже при такой формулировке не понимаю ДЛЯ ЧЕГО? Может там какое-нибудь обоснование есть? Если только для индикации оборотов, то это все решаемо и без датчика. Как простейший вариант на аналоговый выход частотника подается значение оборотов и ставится индикатор со шкалой Индикация будет в любом случае, будет установлен контроллер Simens S1500 (с модулями аналого ввода в том числе) и панель оператора, на которой будет отображена мнемосхема со всеми параметрами установки. Я и предполагал что частоту оборотов двигателя возьму с преобразователя частоты (выход 4-20мА), но меня этот пункт в требованиях немного смутил. Боюсь что проверяющий может прицепиться к этому пункту требований. Хотя с другой стороны Тахометр в переводе означает "скорость, измерение", а уже каким методом будем её измерять это другой вопрос.
Сообщение отредактировал Eugen_Ks - 20.2.2016, 14:07
|
|
|
|
|
|
|
|
20.2.2016, 14:44
|
Группа: New
Сообщений: 5
Регистрация: 19.2.2016
Пользователь №: 290523
|
Цитата(naimen @ 4.2.2016, 19:16) Извините влезу сюда у меня такая проблемв может кто поможет. Мануале по mitsubishi, есть один пример "Регулирование крутящего момента", но там регулирование только через аналоговый вход 0-10В, а мне нужно 4-20мА. У меня один конвейер и два движка, конвейер жесткая сцепка, не могу разобраться что мне нужно "Задание выходного крутящего момента" или "Регулирование крутящего момента" на выходе с аналога хочу присвоить значение 7 на клемму СА или АМ , крутящии момент, на вход 1 или 4 присвоить регулирование крутящего момента(бессенсорное векторное управление) в параметре 800 - 11 значение. В итоге сделать ведомый и ведущий. Вот сомнение дает в мануале "Регулирование крутящего момента" координально отличается в настройке от "Задание крутящего момента". А "Задание крутящего момента" можно осуществить через 4-20мА. Ведущий частотник хочу за параметрировать векторное управление sensorless, а ведомый регулирование по моменту тоже sensorless. Описываю. Шахта -140 метров, стоит конвейер протяженность ленты 1800 метров, по середине стоят два движка по 290 КВт, два частотника FR-A770-355K-79 производителя mitsubishi по 350 квт на 660 В. Проблема заключается в том, что движки горят из за высоких токов. На первом движке оператор выставляет вручную 32.74 Hz, на втором 32.52 Hz, чтобы уравнять токи. Если выставить одинаковую им частоту, то на первом движке без нагрузки на конвейере ленты 230, на втором 180А, приходится подкручивать, частотой, чтобы уравнять токи. Управление стоит безсенсорное векторное управление. Хочу завтра сделать регулирование моментом. На первом частотнике хочу так же оставить векторное безсенсорное управление, а на втором, поставить безсенсорное управление по моменту, и весь это процесс управлять по аналоговому входу и выходу. Только я не пойму есть задание момента, а есть регулирование моментом, а еще есть регулирование магнитным потоком, что выбрать правильней? А под нагрузкой начинаются пляски токов, даже если частоту подогнали, токи от 200 ампер до 300 бегают на одном и так же навтором, ну разность токов всегда присутсвует, то у первого движка больше, то наоборот.И как просит руководство, чтобы токи были одинаковыми. А как сделать токи еще одинаковые, я не знаю. Сегодня пробывал сделать синхронизацию по моменту, все никак, не запускается у меня. Откинул муфты и пробывал их сихронинизировать в master и slave, по входу 4-20ma по частоте, все получается, по наприжению все получается, а вот задавать момент не получается, помогите пожалуйста. Посмотрите параметры пожалуйста, может я что то неправильно выставляю, чтобы управлять по моменту. Со стороны master через клемму CA выдаю 0-10В и присвоил значение для 158 параметра функцию 7 - Фактическое значение крутящего момента. Со стороны Slave выставляю параметр 73 функцию 0, клемма 1, 800 параметр функцию - 11 Бессенсорное векторное управление Регулирование крутящего момента. Параметр 804 задание крутящего момента через аналоговый вход клемма 1. Посмотрите на рисунке, мой параметры для master(ведущий) и slave (ведомый) пожалуйста и скажите что я не так делаю?
photo_1.JPG ( 1,4 мегабайт )
Кол-во скачиваний: 8
photo_2.JPG ( 1,06 мегабайт )
Кол-во скачиваний: 11Добрый день! А может будет проще поставить дополнительно программируемое реле, например из серии EASY фирмы Moeller, с 2 аналоговыми входами и 2 аналоговыми выходами. С помощью реле по значению тока регулируем частоту двигателей. Как вариант.
|
|
|
|
|
|
|
|
20.2.2016, 15:02
|
Группа: Участники форума
Сообщений: 3718
Регистрация: 6.9.2007
Пользователь №: 11117
|
Цитата(Eugen_Ks @ 20.2.2016, 13:57) Индикация будет в любом случае, будет установлен контроллер Simens S1500 (с модулями аналого ввода в том числе) и панель оператора, на которой будет отображена мнемосхема со всеми параметрами установки. Я и предполагал что частоту оборотов двигателя возьму с преобразователя частоты (выход 4-20мА), но меня этот пункт в требованиях немного смутил. Боюсь что проверяющий может прицепиться к этому пункту требований. Хотя с другой стороны Тахометр в переводе означает "скорость, измерение", а уже каким методом будем её измерять это другой вопрос. А это как раз очень важно! Частотник замеряет скорость косвенно. Мало того, в скалярном режиме, не учитывается реальное скольжение. Я, например, всегда ставлю независимые измерители (индикаторы) и на вход питания и на выход регулируемого параметра. Вот только сегодня позвонили с одного местного водозабора, не понимают, почему вдруг нет требуемого напора. Уставка 1,6бар, по датчику 1,2 бар и по манометру столько же. Попросил перелистать текущие параметры работающего насоса (ЭЦВ6-10-110) в ПЧ. Передают: частота 50Гц (скалярный режим), ток 13,5А, мощность на входе 7,2 кВт, напряжение по выходу 340В!!! . Спрашиваю, я что показывает входной вольтметр на дверце, отвечают - 345В!(межфазное) . Как! откуда? Побежали вызывать электриков..
|
|
|
|
|
|
|
|
20.2.2016, 15:44
|
Группа: New
Сообщений: 5
Регистрация: 19.2.2016
Пользователь №: 290523
|
Цитата(По самые по... @ 20.2.2016, 14:02) А это как раз очень важно! Частотник замеряет скорость косвенно. Мало того, в скалярном режиме, не учитывается реальное скольжение.
Я, например, всегда ставлю независимые измерители (индикаторы) и на вход питания и на выход регулируемого параметра. Вот только сегодня позвонили с одного местного водозабора, не понимают, почему вдруг нет требуемого напора. Уставка 1,6бар, по датчику 1,2 бар и по манометру столько же.
Попросил перелистать текущие параметры работающего насоса (ЭЦВ6-10-110) в ПЧ. Передают: частота 50Гц (скалярный режим), ток 13,5А, мощность на входе 7,2 кВт, напряжение по выходу 340В!!! . Спрашиваю, я что показывает входной вольтметр на дверце, отвечают - 345В!(межфазное) . Как! откуда? Побежали вызывать электриков.. Полностью с Вами согласен что косвенно, но в ПБ написано "оснащаются тахометрическими приборами" а к ним можно отнести: магнитоиндукционные тахометры, электрические тахометры, механические тахометры, электромеханические тахометры. На мой взгляд если бы они написали "оснащаются тахометрическими приборами .......... типа" вопрос бы отпал, а так похоже что есть поле для маневра.
|
|
|
|
|
|
|
|
20.2.2016, 16:03
|
Группа: New
Сообщений: 5
Регистрация: 19.2.2016
Пользователь №: 290523
|
Плюс ко всему сигнал "обороты двигателя", по тому же ПБ, не участвует в аварийном останове, следовательно является просто информационным, значит мы можем ставить хоть механический тахометр возле компрессора и чисто теоретически требование "оснащаются тахометрическими приборами" будет выполнено.
|
|
|
|
|
|
|
|
22.2.2016, 18:38
|
Группа: Участники форума
Сообщений: 857
Регистрация: 27.4.2008
Пользователь №: 18181
|
ПБ и ПОТ образца 1997-2003 годов - это то еще дышло.
|
|
|
|
|
|
|
|
6.3.2016, 18:36
|
Группа: Участники форума
Сообщений: 60
Регистрация: 25.7.2013
Пользователь №: 200104
|
Извиняюсь если ответ уже прозвучал, много текста все не перечитывал
Знаю сахарный завод, где это реализовано на вращении барабана. Реализовали просто по току двигателя. Где больше ток, тот нужно притормозить. В личку напишу что за завод, если вам интересно.
|
|
|
|
|
|
|
|
12.3.2016, 22:20
|
Группа: Участники форума
Сообщений: 660
Регистрация: 29.7.2010
Пользователь №: 66483
|
Цитата(Suvuy @ 6.3.2016, 18:36) Извиняюсь если ответ уже прозвучал, много текста все не перечитывал
Знаю сахарный завод, где это реализовано на вращении барабана. Реализовали просто по току двигателя. Где больше ток, тот нужно притормозить. В личку напишу что за завод, если вам интересно. по току не совсем гуманно получается. в ATV71 есть функция LBA - как раз на сахарном заводе она и используется. декантер? - не помню точно. но здоровый барабан.
|
|
|
|
|
|
|
|
4.12.2016, 12:17
|
Группа: New
Сообщений: 1
Регистрация: 4.12.2016
Пользователь №: 310704
|
А не подскажите, как реализовать Вариант 2 на Sinamics G120 CU240B-2 DP? Цитата(poludenny @ 6.9.2013, 10:55) Энкодеры не нужны.
Вариант 1
1ПЧ запитывает сразу два двигателя, подключенных параллельно. Обычно в скалярном режиме это делается, или в "векторном напряженческом".
В принципе вариант рабочий, но на механизмах горизонтального перемещения. Для механизма вертикального перемещения как то .... применений не встречал.
(Этот вариант плохой)
Вариант 2
ПЧ1 запитывает двигатель 1, ПЧ2 запитывает двигатель 2. С аналогового выхода ПЧ1 сигнал "момент двигателя" заводится на аналоговый вход ПЧ2 "задание момента". Т.е. второй ПЧ работает в режиме управления моментом и его момент равен моменту первого двигателя (т.е. распределены равномерно).
Эта схема может работать как с энкодерами, так и без них.
Подойдут ПЧ которые умеют работать в моментном режиме.
Вариант 3
Простой.
ПЧ1 запитывает двигатель 1, ПЧ2 запитывает двигатель 2. Как сказали выше, у ATV71 например, есть функция выравнивания нагрузки. В этом случае два ПЧ работают с одним заданием скорости, но у ПЧ2 (двигателя2) искусственно увеличивается скольжение. Увеличенное скольжение ведет к более-менее точному перераспределению моменов между двумя двигателями.
|
|
|
|
|
|
|
|
4.12.2016, 15:26
|
Группа: Участники форума
Сообщений: 757
Регистрация: 6.3.2014
Пользователь №: 226003
|
А насколько подробней? http://razrab.ru/viewforum.php?f=4Попробуйте здесь.
|
|
|
|
|
|
|
|
7.12.2016, 17:56
|
Группа: Участники форума
Сообщений: 215
Регистрация: 31.3.2015
Пользователь №: 263894
|
Вариант 1 1ПЧ запитывает сразу два двигателя, подключенных параллельно. Обычно в скалярном режиме это делается, или в "векторном напряженческом". В принципе вариант рабочий, но на механизмах горизонтального перемещения. Для механизма вертикального перемещения как то .... применений не встречал. (Этот вариант плохой) -------- Чем плохой? Вот применение: http://alimakhek.com/ru/Izdeliya/Stroitel-nye-pod-emnikihttp://www.pega-hoist.com/index.php?sel=stavebni&lng=enhttp://www.stros.cz/en/products/construction-hoists/Есть и другие примеры. Во всех случаях 2 или 3 мотора подключены к драйву в параллель, каждый мотор соединен со своим редуктором, на выходе редуктора - шестерня, все 3 редуктора на одной зубчатой рейке Та же жесткая связь. Все чудесненько работает. Могу сходить в цех сфоткать блок моторов и фотку выложить если сильно интересно.
|
|
|
|
|
|
|
|
15.12.2017, 11:22
|
Группа: New
Сообщений: 6
Регистрация: 9.4.2015
Пользователь №: 264850
|
Подниму тему, нужна помощь.
Грейферный кран. Два двигателя по 45 кВт. Два альтивара 71 по 75 кВт. Настройки одинаковые полностью. Управление вектор по напряжению без обратной связи.
Подъем отстаёт от захвата и вверх и вниз. Причем на 1 и 2 скорости не сильно, на 3 заметно. Эксплуатационники говорят что раньше не было, я сомневаюсь.
По моему у движка подъёма скольжение больше чем на захвате.
Вижу такие решения.
1) Переключить на вектор по току.
2) Уменьшить SLP, возможно до нуля.
3) Включить выравнивание нагрузки LBA.
Что скажете?
|
|
|
|
|
|
|
|
16.12.2017, 12:26
|
Группа: Участники форума
Сообщений: 3718
Регистрация: 6.9.2007
Пользователь №: 11117
|
Цитата(Bender_R @ 15.12.2017, 11:22) Подниму тему, нужна помощь.
Грейферный кран. Два двигателя по 45 кВт. Два альтивара 71 по 75 кВт. Настройки одинаковые полностью. Управление вектор по напряжению без обратной связи.
Подъем отстаёт от захвата и вверх и вниз. Причем на 1 и 2 скорости не сильно, на 3 заметно. Эксплуатационники говорят что раньше не было, я сомневаюсь.
По моему у движка подъёма скольжение больше чем на захвате.
Вижу такие решения.
1) Переключить на вектор по току.
2) Уменьшить SLP, возможно до нуля.
3) Включить выравнивание нагрузки LBA.
Что скажете? А как так может быть? Движки одинаково настроены, но предназначены для выполнения разных функций - подъем и захват. Поясните по рисунку, где установлены движки? Что означает выравнивание нагрузки? 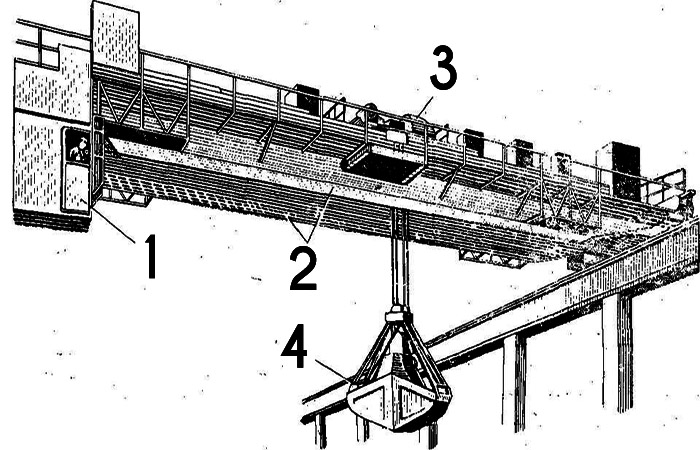
|
|
|
|
|
|
|
|
16.12.2017, 17:49
|
Группа: Участники форума
Сообщений: 757
Регистрация: 6.3.2014
Пользователь №: 226003
|
Не встречал в своей практике электромеханических (только гидравлические), но думаю, что так - когда канат-трос проходит через его блок в одну сторону, то он раскрывается, когда в другую - закрывается. Соответственно чтобы его поднять без изменения состояния захвата необходимо иметь синхронную скорость обоих подматывающих барабанов, чтобы он не раскрылся или не закрывался во время вертикальных перемещений. При опускании для захвата одна сторона опускается быстрей и происходит раскрытие или наоборот.
Движки по сути разматывают один канат, но за разные концы и разными барабанами.
Сообщение отредактировал mr_Frodo64 - 16.12.2017, 17:51
|
|
|
|
|
|
|
|
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0

|
|
Реклама
ООО «Арктика групп» ИНН: 7713634274 | erid 2VtzqvpbUMg
ООО «УНИСПЛИТ» ИНН: 6453155081 erid:2Vtzqv6z6bU
Последние сообщения Форума
|


























