Полная версия этой страницы: Управление преобразователями частоты механически связанными двигателями
Плюс ко всему сигнал "обороты двигателя", по тому же ПБ, не участвует в аварийном останове, следовательно является просто информационным, значит мы можем ставить хоть механический тахометр возле компрессора и чисто теоретически требование "оснащаются тахометрическими приборами" будет выполнено.
ПБ и ПОТ образца 1997-2003 годов - это то еще дышло.
Извиняюсь если ответ уже прозвучал, много текста все не перечитывал
Знаю сахарный завод, где это реализовано на вращении барабана. Реализовали просто по току двигателя. Где больше ток, тот нужно притормозить. В личку напишу что за завод, если вам интересно.
Знаю сахарный завод, где это реализовано на вращении барабана. Реализовали просто по току двигателя. Где больше ток, тот нужно притормозить. В личку напишу что за завод, если вам интересно.
Цитата(Suvuy @ 6.3.2016, 18:36) 
Извиняюсь если ответ уже прозвучал, много текста все не перечитывал
Знаю сахарный завод, где это реализовано на вращении барабана. Реализовали просто по току двигателя. Где больше ток, тот нужно притормозить. В личку напишу что за завод, если вам интересно.
Знаю сахарный завод, где это реализовано на вращении барабана. Реализовали просто по току двигателя. Где больше ток, тот нужно притормозить. В личку напишу что за завод, если вам интересно.
по току не совсем гуманно получается. в ATV71 есть функция LBA - как раз на сахарном заводе она и используется. декантер? - не помню точно. но здоровый барабан.
А не подскажите, как реализовать Вариант 2 на Sinamics G120 CU240B-2 DP?
Цитата(poludenny @ 6.9.2013, 10:55)
Энкодеры не нужны.
Вариант 1
1ПЧ запитывает сразу два двигателя, подключенных параллельно. Обычно в скалярном режиме это делается, или в "векторном напряженческом".
В принципе вариант рабочий, но на механизмах горизонтального перемещения. Для механизма вертикального перемещения как то .... применений не встречал.
(Этот вариант плохой)
Вариант 2
ПЧ1 запитывает двигатель 1, ПЧ2 запитывает двигатель 2. С аналогового выхода ПЧ1 сигнал "момент двигателя" заводится на аналоговый вход ПЧ2 "задание момента". Т.е. второй ПЧ работает в режиме управления моментом и его момент равен моменту первого двигателя (т.е. распределены равномерно).
Эта схема может работать как с энкодерами, так и без них.
Подойдут ПЧ которые умеют работать в моментном режиме.
Вариант 3
Простой.
ПЧ1 запитывает двигатель 1, ПЧ2 запитывает двигатель 2. Как сказали выше, у ATV71 например, есть функция выравнивания нагрузки. В этом случае два ПЧ работают с одним заданием скорости, но у ПЧ2 (двигателя2) искусственно увеличивается скольжение. Увеличенное скольжение ведет к более-менее точному перераспределению моменов между двумя двигателями.
Вариант 1
1ПЧ запитывает сразу два двигателя, подключенных параллельно. Обычно в скалярном режиме это делается, или в "векторном напряженческом".
В принципе вариант рабочий, но на механизмах горизонтального перемещения. Для механизма вертикального перемещения как то .... применений не встречал.
(Этот вариант плохой)
Вариант 2
ПЧ1 запитывает двигатель 1, ПЧ2 запитывает двигатель 2. С аналогового выхода ПЧ1 сигнал "момент двигателя" заводится на аналоговый вход ПЧ2 "задание момента". Т.е. второй ПЧ работает в режиме управления моментом и его момент равен моменту первого двигателя (т.е. распределены равномерно).
Эта схема может работать как с энкодерами, так и без них.
Подойдут ПЧ которые умеют работать в моментном режиме.
Вариант 3
Простой.
ПЧ1 запитывает двигатель 1, ПЧ2 запитывает двигатель 2. Как сказали выше, у ATV71 например, есть функция выравнивания нагрузки. В этом случае два ПЧ работают с одним заданием скорости, но у ПЧ2 (двигателя2) искусственно увеличивается скольжение. Увеличенное скольжение ведет к более-менее точному перераспределению моменов между двумя двигателями.
Вариант 1
1ПЧ запитывает сразу два двигателя, подключенных параллельно. Обычно в скалярном режиме это делается, или в "векторном напряженческом".
В принципе вариант рабочий, но на механизмах горизонтального перемещения. Для механизма вертикального перемещения как то .... применений не встречал.
(Этот вариант плохой)
--------
Чем плохой? Вот применение:
http://alimakhek.com/ru/Izdeliya/Stroitel-nye-pod-emniki
http://www.pega-hoist.com/index.php?sel=stavebni&lng=en
http://www.stros.cz/en/products/construction-hoists/
Есть и другие примеры.
Во всех случаях 2 или 3 мотора подключены к драйву в параллель, каждый мотор соединен со своим редуктором, на выходе редуктора - шестерня, все 3 редуктора на одной зубчатой рейке
Та же жесткая связь. Все чудесненько работает.
Могу сходить в цех сфоткать блок моторов и фотку выложить если сильно интересно.
1ПЧ запитывает сразу два двигателя, подключенных параллельно. Обычно в скалярном режиме это делается, или в "векторном напряженческом".
В принципе вариант рабочий, но на механизмах горизонтального перемещения. Для механизма вертикального перемещения как то .... применений не встречал.
(Этот вариант плохой)
--------
Чем плохой? Вот применение:
http://alimakhek.com/ru/Izdeliya/Stroitel-nye-pod-emniki
http://www.pega-hoist.com/index.php?sel=stavebni&lng=en
http://www.stros.cz/en/products/construction-hoists/
Есть и другие примеры.
Во всех случаях 2 или 3 мотора подключены к драйву в параллель, каждый мотор соединен со своим редуктором, на выходе редуктора - шестерня, все 3 редуктора на одной зубчатой рейке
Та же жесткая связь. Все чудесненько работает.
Могу сходить в цех сфоткать блок моторов и фотку выложить если сильно интересно.
Подниму тему, нужна помощь.
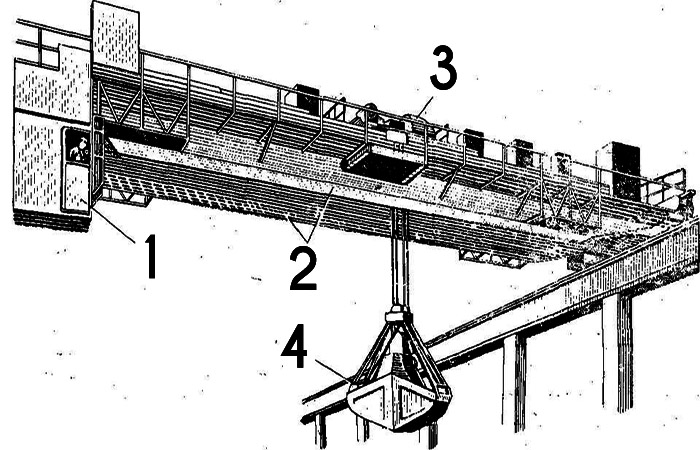
Грейферный кран. Два двигателя по 45 кВт. Два альтивара 71 по 75 кВт. Настройки одинаковые полностью. Управление вектор по напряжению без обратной связи.
Подъем отстаёт от захвата и вверх и вниз. Причем на 1 и 2 скорости не сильно, на 3 заметно. Эксплуатационники говорят что раньше не было, я сомневаюсь.
По моему у движка подъёма скольжение больше чем на захвате.
Вижу такие решения.
1) Переключить на вектор по току.
2) Уменьшить SLP, возможно до нуля.
3) Включить выравнивание нагрузки LBA.
Что скажете?
Грейферный кран. Два двигателя по 45 кВт. Два альтивара 71 по 75 кВт. Настройки одинаковые полностью. Управление вектор по напряжению без обратной связи.
Подъем отстаёт от захвата и вверх и вниз. Причем на 1 и 2 скорости не сильно, на 3 заметно. Эксплуатационники говорят что раньше не было, я сомневаюсь.
По моему у движка подъёма скольжение больше чем на захвате.
Вижу такие решения.
1) Переключить на вектор по току.
2) Уменьшить SLP, возможно до нуля.
3) Включить выравнивание нагрузки LBA.
Что скажете?
Цитата(Bender_R @ 15.12.2017, 11:22)
Подниму тему, нужна помощь.
Грейферный кран. Два двигателя по 45 кВт. Два альтивара 71 по 75 кВт. Настройки одинаковые полностью. Управление вектор по напряжению без обратной связи.
Подъем отстаёт от захвата и вверх и вниз. Причем на 1 и 2 скорости не сильно, на 3 заметно. Эксплуатационники говорят что раньше не было, я сомневаюсь.
По моему у движка подъёма скольжение больше чем на захвате.
Вижу такие решения.
1) Переключить на вектор по току.
2) Уменьшить SLP, возможно до нуля.
3) Включить выравнивание нагрузки LBA.
Что скажете?
Грейферный кран. Два двигателя по 45 кВт. Два альтивара 71 по 75 кВт. Настройки одинаковые полностью. Управление вектор по напряжению без обратной связи.
Подъем отстаёт от захвата и вверх и вниз. Причем на 1 и 2 скорости не сильно, на 3 заметно. Эксплуатационники говорят что раньше не было, я сомневаюсь.
По моему у движка подъёма скольжение больше чем на захвате.
Вижу такие решения.
1) Переключить на вектор по току.
2) Уменьшить SLP, возможно до нуля.
3) Включить выравнивание нагрузки LBA.
Что скажете?
А как так может быть? Движки одинаково настроены, но предназначены для выполнения разных функций - подъем и захват.
Поясните по рисунку, где установлены движки? Что означает выравнивание нагрузки?
Не встречал в своей практике электромеханических (только гидравлические), но думаю, что так - когда канат-трос проходит через его блок в одну сторону, то он раскрывается, когда в другую - закрывается. Соответственно чтобы его поднять без изменения состояния захвата необходимо иметь синхронную скорость обоих подматывающих барабанов, чтобы он не раскрылся или не закрывался во время вертикальных перемещений. При опускании для захвата одна сторона опускается быстрей и происходит раскрытие или наоборот.
Движки по сути разматывают один канат, но за разные концы и разными барабанами.
Движки по сути разматывают один канат, но за разные концы и разными барабанами.
Цитата(Bender_R @ 15.12.2017, 12:22)
1) Переключить на вектор по току.
2) Уменьшить SLP, возможно до нуля.
3) Включить выравнивание нагрузки LBA.
Что скажете?
2) Уменьшить SLP, возможно до нуля.
3) Включить выравнивание нагрузки LBA.
Что скажете?
1. Что даст вектор по току ( честно говоря не знаком с его теорией)?
2. Уменьшив SLP до 0 у мотора, который "убегает" - отключите компенсацию скольжения и может помочь, но сразу до 0 думаю резковато, лучше ступенчато, с контролем результата. Либо "антивариант" - увеличить компенсацию у вялого мотора, но тут есть риск ухода в перенасыщение. По сути там просто добавляется или убавляется результирующее по ШИМ напряжение.
3. LBA ничего не даст, т.к. рассчитано на механически жестко связанные механизмы.
Не учел что здесь форум вентиляции и кондиционирования, а не кранов.
1) движки стоят на тележке, тележка на мосту, мост на подкрановом пути.
2) грейфер такая железная хрень, как морда годзилы. Эта морда висит на тросах лебедки подъёма. Внутри морды полиспаст между челюстями, тросы от которого идут на лебёдку захвата.
Есть три основных варианта: 1. Тянет подъем - рот открывается. 2. Тянет захват - рот закрывается. 3. Тянут подъем и захват вместе - морда годзилы поднимается вверх.
Если годзила укусила, и поднимает добычу, то чтобы не блевануть, подъем и захват должны тянуть строго синхронно.
3) честно сам не понял разницу между вектором по напряжению и току. Только напряжение - 1,2 и более двигателей, ток - строго 1. По техдоку. В этом есть надежда.
Если есть ссылки на разъяснения по вектору тока или напряжения ДАЙТЕ!
4) slp как я думаю, это компенсация скольжения на номинальном моменте. Т.е. при 100% на номинале момента ПЧ делает на движке синхронную скорость (500, 1000, 1500 и ТД). При 0% движка работает как обычный АД на скольжении из таблички. При 110% ПЧ старается добавить скорости (+10% от скольжения). Все это на номинале момента. Т.Е. slp - это регулятор жёсткости характеристики.
Если slp =0 ,хар-ка не абсолютно жёсткая , на одинаковом задании скорости движки выровняются по нагрузке, и не будет провисания канатов.
Slp нужно менять для обоих движков, пусть ровняются всё время. Хуже будет если перетянет подъем.
5) lba как я думаю, коррекция скорости по моменту (нагрузке). Подъем и захват, хоть и не связаны жёстко, но перераспределение нагрузки по лебедкам происходит постоянно, и видима зависимость от скорости подмотки канатов ( по ограничителю нагрузки ОНК-160). Можно попробовать.
Все сказанное мое личное мнение, возможно ошибочное. Если ошибаюсь, ткните харей.
1) движки стоят на тележке, тележка на мосту, мост на подкрановом пути.
2) грейфер такая железная хрень, как морда годзилы. Эта морда висит на тросах лебедки подъёма. Внутри морды полиспаст между челюстями, тросы от которого идут на лебёдку захвата.
Есть три основных варианта: 1. Тянет подъем - рот открывается. 2. Тянет захват - рот закрывается. 3. Тянут подъем и захват вместе - морда годзилы поднимается вверх.
Если годзила укусила, и поднимает добычу, то чтобы не блевануть, подъем и захват должны тянуть строго синхронно.
3) честно сам не понял разницу между вектором по напряжению и току. Только напряжение - 1,2 и более двигателей, ток - строго 1. По техдоку. В этом есть надежда.
Если есть ссылки на разъяснения по вектору тока или напряжения ДАЙТЕ!
4) slp как я думаю, это компенсация скольжения на номинальном моменте. Т.е. при 100% на номинале момента ПЧ делает на движке синхронную скорость (500, 1000, 1500 и ТД). При 0% движка работает как обычный АД на скольжении из таблички. При 110% ПЧ старается добавить скорости (+10% от скольжения). Все это на номинале момента. Т.Е. slp - это регулятор жёсткости характеристики.
Если slp =0 ,хар-ка не абсолютно жёсткая , на одинаковом задании скорости движки выровняются по нагрузке, и не будет провисания канатов.
Slp нужно менять для обоих движков, пусть ровняются всё время. Хуже будет если перетянет подъем.
5) lba как я думаю, коррекция скорости по моменту (нагрузке). Подъем и захват, хоть и не связаны жёстко, но перераспределение нагрузки по лебедкам происходит постоянно, и видима зависимость от скорости подмотки канатов ( по ограничителю нагрузки ОНК-160). Можно попробовать.
Все сказанное мое личное мнение, возможно ошибочное. Если ошибаюсь, ткните харей.
Всё верно но повторюсь, что ЛБА для жесткой сцепки (транспортеры, вагонетки и тд)
Цитата(mr_Frodo64 @ 17.12.2017, 1:35)
Всё верно но повторюсь, что ЛБА для жесткой сцепки (транспортеры, вагонетки и тд)
Как раз нет. Не для жёсткой.
Поверите или нет - по хрену. Оно так и есть.
По крану тоже можно поговорить. Но лень.
Цитата(Andrew_2610 @ 17.12.2017, 12:05)
Как раз нет. Не для жёсткой.
Поверите или нет - по хрену. Оно так и есть.
По крану тоже можно поговорить. Но лень.
Поверите или нет - по хрену. Оно так и есть.
По крану тоже можно поговорить. Но лень.
В вашем стиле. объяснимо...
Да, лень. Да и как объяснить я не знаю. А затем главное. У вас вон как мантра - для жёстких сцепки. Для жёсткой сцепки вообще ведущий ведомый по моменту. А лба универсально вообще.
Какая мантра?!? Официальный документ, коему доверяю аки себе любимому )))
"Применяется в случае, когда два двигателя, управляемые отдельными ПЧ, связаны кинематически друг с другом и, следовательно, вращаются принудительно с одинаковой скоростью. "
В кавычках - потому что выдержка.
Вам не лень, вам нечем.
"Применяется в случае, когда два двигателя, управляемые отдельными ПЧ, связаны кинематически друг с другом и, следовательно, вращаются принудительно с одинаковой скоростью. "
В кавычках - потому что выдержка.
Вам не лень, вам нечем.
Мантра и есть.
Вообще фраза "кинематически связаны" не означает, что скорости одинаковые.
Связь имеет некоторую жесткость или упругость.
Документ, на который вы ссылаетесь, что-то типа презентации.
Надо ж ещё и знания применять. У кого какие есть.
Вообще фраза "кинематически связаны" не означает, что скорости одинаковые.
Связь имеет некоторую жесткость или упругость.
Документ, на который вы ссылаетесь, что-то типа презентации.
Надо ж ещё и знания применять. У кого какие есть.
Цитата(Andrew_2610 @ 20.12.2017, 19:29)
Вообще фраза "кинематически связаны" не означает, что скорости одинаковые.


Цитата(Andrew_2610 @ 20.12.2017, 19:29)
Связь имеет некоторую жесткость или упругость.
... бесспорно. И я о том же.Цитата(Andrew_2610 @ 20.12.2017, 19:29)
Документ, на который вы ссылаетесь, что-то типа презентации.
Обычное руководство по программированию самых что-ни наесть ATV71. На всякий случай... А то вдруг я выдумал.
"Вообще фраза "кинематически связаны" не означает, что скорости одинаковые."
следующая фраза - про упругость. Там все понятно.
А вот про одинаковые скорости - непонятно.
Если связь упругая, то скорости разные. Если связь бесконечно жесткая - да, одинаковые. Но в реальности таких свяхей нет. Поэтому скорости разные.
Я ж говорю - мантра.
Книжки читать надо, а не форумы.
следующая фраза - про упругость. Там все понятно.
А вот про одинаковые скорости - непонятно.
Если связь упругая, то скорости разные. Если связь бесконечно жесткая - да, одинаковые. Но в реальности таких свяхей нет. Поэтому скорости разные.
Я ж говорю - мантра.
Книжки читать надо, а не форумы.
Цитата(Andrew_2610 @ 21.12.2017, 10:27)
"Вообще фраза "кинематически связаны" не означает, что скорости одинаковые."
следующая фраза - про упругость. Там все понятно.
А вот про одинаковые скорости - непонятно.
Если связь упругая, то скорости разные. Если связь бесконечно жесткая - да, одинаковые. Но в реальности таких свяхей нет. Поэтому скорости разные.
Я ж говорю - мантра.
Книжки читать надо, а не форумы.
следующая фраза - про упругость. Там все понятно.
А вот про одинаковые скорости - непонятно.
Если связь упругая, то скорости разные. Если связь бесконечно жесткая - да, одинаковые. Но в реальности таких свяхей нет. Поэтому скорости разные.
Я ж говорю - мантра.
Книжки читать надо, а не форумы.
В реальности таких связей более чем дофига. Пример 2 движка сидят на одной зубчатой рейке (каждый через свой редуктор, на выходе редуктора - щестерня и они на одной зубчатой рейке). Тут упругость чисто теоритическая - в реальности связь жесткая и скорости будут одинаковы.
Садим два двигателя на один вал. Упругость будет тоже чисто теоритическая.
Это вам кажется, что двигатели на одном валу - жёсткая связь. Все зависит от параметров вала.
Хотя если рассуждать по деревенски - да. Жёсткая. А вот ежели вал резиновый - то да, гибкая. На хрен только такой вал. Но в деревне сгодится.
ТеорЕТически пишется правильно.
Садим два двигателя ... Хорошо не ложим ...
Хотя если рассуждать по деревенски - да. Жёсткая. А вот ежели вал резиновый - то да, гибкая. На хрен только такой вал. Но в деревне сгодится.
ТеорЕТически пишется правильно.
Садим два двигателя ... Хорошо не ложим ...
Цитата(Andrew_2610 @ 22.12.2017, 3:21)
Это вам кажется, что двигатели на одном валу - жёсткая связь. Все зависит от параметров вала.
Хотя если рассуждать по деревенски - да. Жёсткая. А вот ежели вал резиновый - то да, гибкая. На хрен только такой вал. Но в деревне сгодится.
ТеорЕТически пишется правильно.
Садим два двигателя ... Хорошо не ложим ...
Хотя если рассуждать по деревенски - да. Жёсткая. А вот ежели вал резиновый - то да, гибкая. На хрен только такой вал. Но в деревне сгодится.
ТеорЕТически пишется правильно.
Садим два двигателя ... Хорошо не ложим ...
Можно порассуждать о гибких валах, сферических конях и прочих теоретических прелестях. На практике если вал не жесткий его срутит при первом же запуске. Конечно может быть какие то вариации в случае частого изменения скорости и направления вращения, но не такие что бы городить огород с какими системами стабилизации скорости.
У меня 2 или 3 мотора (18,5 или 22 кВт) форсированные в 2 раза. Т.е. 3 на 37 квт или 3 на 44 квт в самом крутом случае подключены паралельно к одному драйву, сидят (лежат, если нравиться) на одной зучатой рейке и все чудесно работает. Никаких вариаций скорости и прочих теоретических ужасов по крайней мере не заметно.
Если очень хочется сложняков - ставим 2 вакона (каждый подключен к своему мотору, на каждом моторе анкодер) с аппликацией shaft synchronization. Я так делал раз подъемник - на базе 2-х колонн (2 мотора на каждой колонне слева и справа) и мы не успевали сделать вал для связи моторов между ними . Сделали на базе 2 драйвов с этой аппликацией. Каждый драйв крутит 2 мотора, которые сидят на одной жесткой рейке. Все работает чудесно. Только мы городили огород вынуждено....
Вот блок из двух моторов на одной зубчатой рейке, и машина на 2 колоннах .
Цитата(IGR1 @ 22.12.2017, 20:47)
Вот блок из двух моторов на одной зубчатой рейке, и машина на 2 колоннах .
Да товарищ живёт на своей планете с гнущимися, мнущимися и жидкими валами... О чем вы?!? ))) Нам, обычным деревенским землянам не понять его высокоматериальные и выскоточные выкладки ))))) Ну зато насмешил... - спОсибо!!!
И да простит топикстартёр, что "замариновали" важную для него тему!
Вагоноразгрузчик
Вал
Два двигателя опыт показал, что вал имеет гибкость.
Вы просто живёте с понятиями электромонтёра. Провода приладил и включил.
У кого-то вон и управление с положительной ос возможно.
Вал
Два двигателя опыт показал, что вал имеет гибкость.
Вы просто живёте с понятиями электромонтёра. Провода приладил и включил.
У кого-то вон и управление с положительной ос возможно.
Цитата(Andrew_2610 @ 23.12.2017, 15:26)
У кого-то вон и управление с положительной ос возможно.
Вот спасибо... а я то сдуру поверил буржуинам проклятым с ихними паспортами...
Цитата
08-00 Вход для сигнала
обратной связи ПИД
4: Положительная обратная связь на входе AVI
(параметр 03-00)
5: Положительная обратная связь на входе платы
PG (параметр 10-15, без направления)
6: Положительная обратная связь на входе платы
обратной связи ПИД
4: Положительная обратная связь на входе AVI
(параметр 03-00)
5: Положительная обратная связь на входе платы
PG (параметр 10-15, без направления)
6: Положительная обратная связь на входе платы
Даже попробовал реализовать..таки работает, как пишут..
Совсем с дубу буржуины впали...
Не читают они "правильных спецов" на авоке то..
Цитата(Сергей Валерьевич @ 23.12.2017, 15:35)
Вот спасибо... а я то сдуру поверил буржуинам проклятым с ихними паспортами...
Даже попробовал реализовать..таки работает, как пишут..
Совсем с дубу буржуины впали...
Не читают они "правильных спецов" на авоке то..
Даже попробовал реализовать..таки работает, как пишут..
Совсем с дубу буржуины впали...
Не читают они "правильных спецов" на авоке то..
Ох, Сергей Валерьевич! Это "переводчики" с китайского на англицкий, а затем на русский постарались!
Понятие ПОС и ООС относится к сложению или к разности сигнала задания и сигнала обратной связи, соответственно.
Смотрите там же, ниже, схему ПИД-регулятора: это всегда РАЗНОСТЬ!!!
Дальше они исправились:
Цитата
ошибка = заданное значение – сигнал обратной связи.
Используется для увеличения выходной частоты при уменьшении фактической величины.
Используется для увеличения выходной частоты при уменьшении фактической величины.
и
Цитата
ошибка = сигнал обратной связи – заданное значение.
Используется для увеличения выходной частоты при увеличении фактической величины
Используется для увеличения выходной частоты при увеличении фактической величины
Не знаю, что и как переводили, но при разработки проекта попытался это воспроизвести ..
Задал значение, и при возрастание разности обратной связи возрастали обороты АД. Что меня сначала смутило.. Причем это произошло чисто случайно, не переключил правильно параметр.
Потом для интереса еще пару раз проверил..
Увы, повторить уже не смогу, так как оборудование работает у заказчика, и весьма успешно.
Так что буду ждать следующего заказа, чтоб еще раз поэкспериментировать..
Всегда работал с ООС, а тут получил опыт с ПОС.
Задал значение, и при возрастание разности обратной связи возрастали обороты АД. Что меня сначала смутило.. Причем это произошло чисто случайно, не переключил правильно параметр.
Потом для интереса еще пару раз проверил..
Увы, повторить уже не смогу, так как оборудование работает у заказчика, и весьма успешно.
Так что буду ждать следующего заказа, чтоб еще раз поэкспериментировать..
Всегда работал с ООС, а тут получил опыт с ПОС.
Цитата(Сергей Валерьевич @ 24.12.2017, 0:22)
Не знаю, что и как переводили, но при разработки проекта попытался это воспроизвести ..
Задал значение, и при возрастание разности обратной связи возрастали обороты АД. Что меня сначала смутило.. Причем это произошло чисто случайно, не переключил правильно параметр.
Всегда работал с ООС, а тут получил опыт с ПОС.
Задал значение, и при возрастание разности обратной связи возрастали обороты АД. Что меня сначала смутило.. Причем это произошло чисто случайно, не переключил правильно параметр.
Всегда работал с ООС, а тут получил опыт с ПОС.
Слово "разность" и говорит о том, что имеем дело с ООС. А управляющее воздействие, в данном случае - частота вращения, может увеличиваться или уменьшаться. Это определяется технологией процесса.
Без разницы увеличиваются или уменьшаются обороты , главное , как влияет изменение выхода на входной сигнал.
Цитата(Blade runner @ 24.12.2017, 10:58)
Без разницы увеличиваются или уменьшаются обороты , главное , как влияет изменение выхода на входной сигнал.
Да не без разницы, а как задаст пользователь.
Вот три примера:
Нажмите для просмотра прикрепленного файла
Вы меня извините, Сергей Валерьевич, но Вы не знаете азов. Просто неграмотность демонстрируете. И ведь пишут Вам. А нет. Мануал тычете. Который перевели тыщу раз. Причем тыщу раз переводчики попадались те, которые про обратную связь вообще не слышали до этого.
Цитата(Bender_R @ 17.12.2017, 1:29)
Есть три основных варианта: 1. Тянет подъем - рот открывается. 2. Тянет захват - рот закрывается. 3. Тянут подъем и захват вместе - морда годзилы поднимается вверх.
Если годзила укусила, и поднимает добычу, то чтобы не блевануть, подъем и захват должны тянуть строго синхронно.
Если годзила укусила, и поднимает добычу, то чтобы не блевануть, подъем и захват должны тянуть строго синхронно.
"Строго синхронно" - это надо ставить датчики положения (энкодеры) и завязывать систему управления на них.
Но тут же Вы потом говорите:
Цитата(Bender_R @ 17.12.2017, 1:29)
Хуже будет если перетянет подъем.
То есть как бы захват надо тянуть всегда чуть быстрее и будет счастье?
Всякие жалкие попытки синхронизировать скорости или положения, не имея датчиков, не обеспечат строгой синхронизации. Лучше развивать тему, что нужна нестрогая синхронизация...
как делают такие системы:
используют переключение конфигураций. Одна - master/slave или LBA. Эта конфигурация для подъема.
Когда нужно только управлять грейфером - другая конфигурация.
Энкодеры - конечно,хорошо.
используют переключение конфигураций. Одна - master/slave или LBA. Эта конфигурация для подъема.
Когда нужно только управлять грейфером - другая конфигурация.
Энкодеры - конечно,хорошо.
Для просмотра полной версии этой страницы, пожалуйста, пройдите по ссылке.